1.1. Vectores en el plano#
1.1.1. Definición de vector en el plano#
Muchas cantidades en geometría y física (área, volumen, temperatura, masa, tiempo,…) se pueden caracterizar por un único número real que se escala a las unidades de medida adecuadas (\(m^2\), \(m^3\), \(^\text{o}\)C,…). Se llaman magnitudes escalares, y al número real asociado con ellas se le llama escalar.
Sin embargo, otras cantidades (fuerza, velocidad, aceleración,…) implican magnitud y dirección y no pueden caracterizarse completamente por un solo número real: necesitaremos los vectores (y, más adelante, en algunos casos, las matrices).
De momento, vamos a centrarnos en dar una correcta definición para estas cantidades en el plano, \(\mathbb{R}^2\).
Definition
Llamaremos vector a un segmento en el plano, que estará caracterizado por el ángulo que forma con el eje \(OX\) (dirección) y por su longitud (o magnitud).
Suele representarse con una flecha con un punto inicial y un punto final en el plano, aunque esta representación puede dar lugar a confusiones, ya que dos segmentos con la misma longitud y dirección, aunque partan de puntos diferentes, definen el mismo vector.
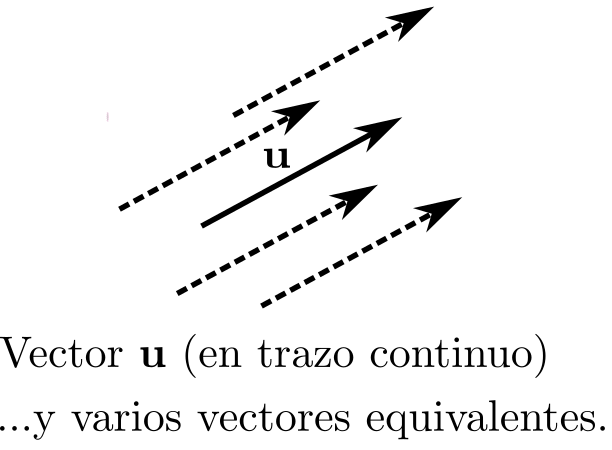
A lo largo del presente libro denotaremos los vectores mediante letras minúscula y en negrita (\(\mathbf{n}\), \(\mathbf{u}\), \(\mathbf{v}\),… ), aunque cuando se escriben a mano suelen denotarse con una flecha (\(\vec{n}\), \(\vec{u}\), …).
Vamos a ver un ejemplo para que nos quede claro que dos segmentos con la misma dirección y longitud definen el mismo vector.
Example
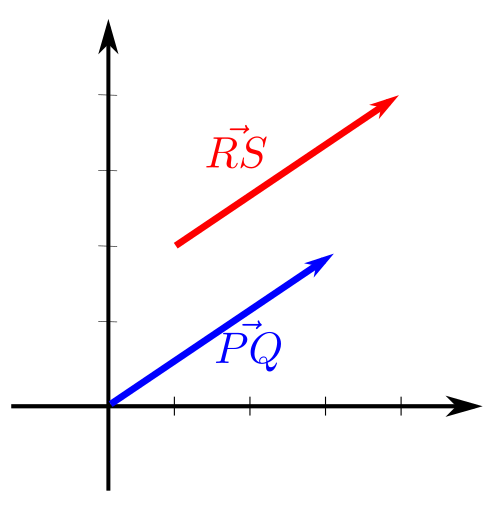
Comprueba que, para los puntos \(P=(0,0)\), \(Q=(3,2)\), \(R=(1,2)\) y \(S=(4,4)\), los segmentos \(\vec{PQ}\) y \(\vec{SR}\) definen el mismo vector.
Vamos a comprobar que tienen la misma longitud y la misma pendiente (lo que implica que tendrán la misma dirección):
Longitud \(\vec{PQ}\): \(\sqrt{(3-0)^2+(2-0)^2} = \sqrt{13}\).
Longitud \(\vec{RS}\): \(\sqrt{(4-1)^2 + (4-2)^2} = \sqrt{13}\).
Pendiente que forma \(\vec{PQ}\) con la recta \(OX\): \(\frac{2-0}{3-0} = \frac{2}{3}\).
Pendiente que forma \(\vec{RS}\) con la recta \(OX\): \(\frac{4-2}{4-1} = \frac{2}{3}\).
Una vez aclarado que hay muchos segmentos que representan al mismo vector, conviene unificar esto. Por ello, entre todos los vectores con la misma longitud y dirección, suele elegirse el que tiene como punto de inicio el origen de coordenadas, \((0,0)\). Entonces, si entendemos que el punto inicial será el \((0,0)\), basta dar el punto final, \(Q=\left(v_{1}, v_{2}\right)\), para tener totalmente identificado un vector \(\mathbf{v}\).
Definition (Definición de un vector mediante sus componentes)
Definiremos \(\mathbf{v}\) como un vector en el plano mediante las coordenadas, \(\left( v_{1}, v_{2}\right)\), de su punto final, entendiendo que el punto inicial es el origen \((0,0)\). En este sentido, identificaremos vectores en el plano con elementos del espacio \(\mathbb{R} \times \mathbb{R} = \mathbb{R}^2\).
Las componentes \(v_{1}\) y \(v_{2}\) son las componentes de \(\mathbf{v}\).
Si el punto inicial y el punto final están ambos en el origen, entonces decimos que \(\mathbf{v}\) es el vector cero (o vector nulo) y se denota por \(\mathbf{0}= (0,0)\).
La longitud de \(\mathbf{v}\) se llama norma de \(\mathbf{v}\),
Si \(\|\mathbf{v}\| = 1\) diremos que \(\mathbf{v}\) es un vector unitario.
Además, \(\|\mathbf{v}\| = 0\) si y sólo si \(\mathbf{v} = \mathbf{0}\).
1.1.2. Operaciones vectoriales#
Definition (Suma de vectores y multiplicación por un escalar)
Sean \(\mathbf{u}=\left( u_{1}, u_{2}\right)\) y \(\mathbf{v}=\left( v_{1}, v_{2}\right)\) vectores y sea \(c\in\mathbb{R}\) un escalar.
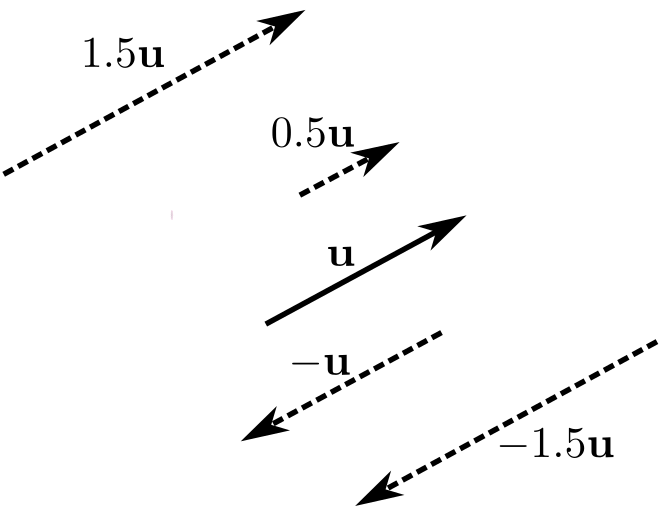
El múltiplo escalar de \(c\) y \(\mathbf{u}\) es el vector \(c\mathbf{u} := \left( cu_{1}, cu_{2}\right)\).
La suma vectorial de \(\mathbf{u}\) y \(\mathbf{v}\) es el vector \(\mathbf{u}+\mathbf{v} := \left( u_{1} + v_{1}, u_{2} + v_{2}\right)\).
Veamos algunas consideraciones geométricas para estas operaciones:
El múltiplo escalar, \(c\mathbf{u}\), de un vector, \(\mathbf{u}\), es un vector que tiene módulo \(|c|\) veces \(\|\mathbf{u}\|\) y la misma dirección si \(c\) es positivo mientras que, para \(c\) un número negativo, direcciones opuestas. Lo ilustramos en la siguiente figura:
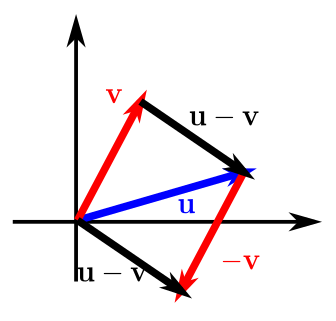
La suma de vectores, \(\mathbf{u}+\mathbf{v}\), puede entenderse gráficamente como la diagonal del paralelogramo que tiene como lados adyacentes \(\mathbf{u}\) y \(\mathbf{v}\), o, equivalentemente, como el resultado de colocar el segundo de los vectores en la punta del primero.
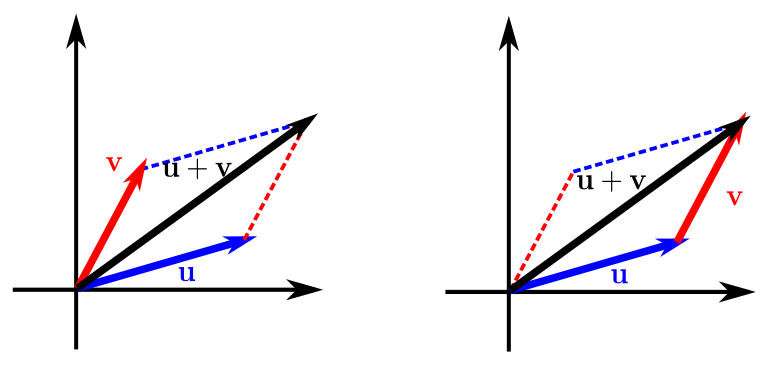
En consecuencia, podemos también interpretar gráficamente la resta de vectores jugando con el paralelogramo resultante.
Theorem (Desigualdad triangular)
Sean \(\mathbf{u}\), \(\mathbf{v}\in\mathbb{R}^2\). Entonces
La igualdad sólo se cumplirá si \(\mathbf{u}\) y \(\mathbf{v}\) tienen la misma dirección.
Theorem (Propiedades de la suma de vectores y multiplicación por escalar)
Sean \(\mathbf{u}\), \(\mathbf{v}\), \(\mathbf{w}\in\mathbb{R}^2\) y \(c\), \(d\in\mathbb{R}\). Entonces:
Al cumplirse estas nueve propiedades podemos afirmar que el espacio de vectores, con la suma y la multiplicación por escalares así definidas, forman un espacio vectorial.
1.1.3. Vectores unitarios#
Dado un vector \(\mathbf{u}\), muchas veces es importante calcular otro vector en la misma dirección y que tenga módulo \(1\) (es decir, que sea unitario). Lo definimos a continuación:
Definition (Vector unitario)
Sean \(\mathbf{u}\in\mathbb{R}^{2}\). Definimos \(\mathbf{u}_{1}\in\mathbb{R}^{2}\), el vector unitario en la dirección de \(\mathbf{u}\) como
Por su definición, es evidente que \(\|\mathbf{u}_{1}\| = 1\).
Dentro de todas las infinitas direcciones que existen en \(\mathbb{R}^2\) vamos a destacar dos de ellas, las llamadas direcciones canónicas, que nos permitirán utilizar una representación cartesiana del plano. Vamos a definir a continuación los vectores unitarios en estas direcciones:
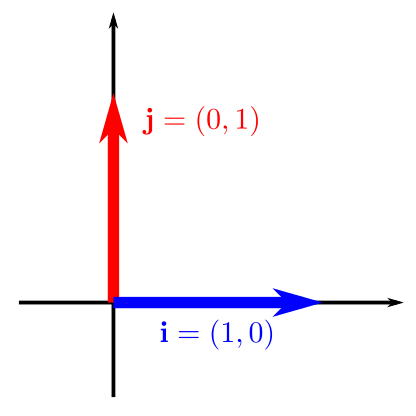
Definition (Vectores unitarios canónicos)
Llamaremos vectores unitarios canónicos a
\(\mathbf{i} = (1,0)\),
\(\mathbf{j} = (0,1)\).
Una vez que ya hemos definido los evctores canónicos unitarios, podemos escribir cualquier vector, utilizando sus coordenadas, en función de éstos:
1.1.4. Jugando con vectores en Sympy y Numpy#
Ahora deberías leerte las secciónes Introducción a SymPy y Introducción a Numpy para poder jugar un poco con las propiedades que acabas de aprender de vectores y con las librerías Sympy y Numpy, que utilizaremos a lo largo del presente curso. Te damos alguna pista:
import numpy as np
# Definimos los vectores u y v
u = np.array([1, 2])
v = np.array([3, 4])
# Imprimimos en pantalla estos vectores
print('u: ',u)
print('v: ',v)
# Sumamos los vectores, almacenando el resultado en w1
w1 = u + v
print('u+v: ', w1)
# Multiplicamos u por 3, v por -2 y los sumamos en w2
w2 = 3*u - 2*v
print('3u - 2v: ', w2)
u: [1 2]
v: [3 4]
u+v: [4 6]
3u - 2v: [-3 -2]
En Sympy hay que definir los vectores como matrices unidimensionales. En general, será útil si queremos mantener fracciones o queremos realizar cálculos simbólicos sobre los vectores:
import sympy as sp
x = sp.Symbol('x', real=True)
# Definimos los vectores u y v
u = sp.Matrix([sp.frac('1/2'), sp.frac('1/3')])
v = sp.Matrix([sp.frac('1/5'), 1])
w = sp.Matrix([1/x, x**2])
# Sumamos los vectores, almacenando el resultado en w1
w1 = u + v
print('u+v: ', w1)
# Queda más chulo con display:
display(w1)
# Multiplicamos w por 3
display('3w:',3*w)
u+v: Matrix([[7/10], [4/3]])
'3w:'
Ahora puedes aprovechar la potencia de cualquiera de estas librerías (tampoco es que sea muy necesaria para lo que se avecina, pero…) y resolver el siguiente problema:
Example 1.1
Si dos remolcadores empujan un petrolero, el primero con una fuerza de módulo 8000 HP en la dirección \((1,-1)\) y el segundo con una fuerza de 10000 HP en la dirección \((1,1)\).
¿Cuál es la magnitud y la dirección resultante del empuje de los 2 remolcadores?
Si el primer remolcador aumentara su empuje un 50 %, manteniendo la misma dirección, ¿cuál sería la fuerza resultante?